
Nos logiciels actuels de navigation permettent de définir une route « optimale » à l’aide des données de nos bateaux, les informations météo et la cartographie.
Mais comment cela fonctionne-t-il exactement ?
Définition et concept fondamental
Une isochrone (du grec isos, égal, et chronos, temps) est, dans le contexte de la navigation, le lieu géométrique de tous les points que peut atteindre un voilier en un temps identique depuis un point de départ donné, quel que soit le cap suivi.
La méthode des isochrones est une méthode de calcul basée sur des constructions géométriques. Elles utilisent les données météo (dont principalement la direction du vent et sa vitesse) ainsi que les données intrinsèques au bateau définies par sa polaire (vitesse estimée du bateau en fonction du vent).
Les polaires : la donnée d’entrée fondamentale
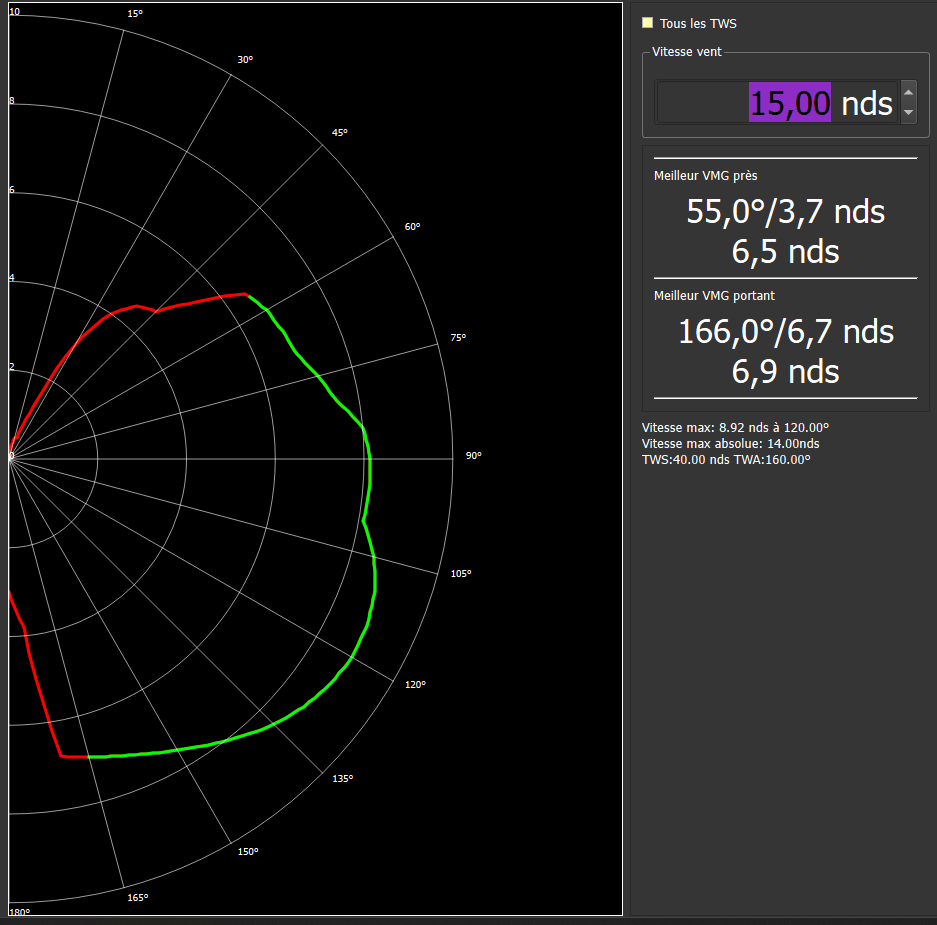
La méthode des isochrones repose sur les polaires du voilier — une représentation mathématique de sa vitesse en fonction de l’angle de vent réel (TWA, True Wind Angle) et de la force du vent réel (TWS, True Wind Speed).
Structure d’une polaire
Une polaire est une table à double entrée : pour chaque combinaison (TWA, TWS), elle donne la vitesse bateau (BSP, Boat Speed). En pratique, les tables de polaires couvrent des TWA allant d’environ 30° à 180° et des TWS de 4 à 30 nœuds ou plus, avec des valeurs intermédiaires obtenues par interpolation.
VMC : la notion clé
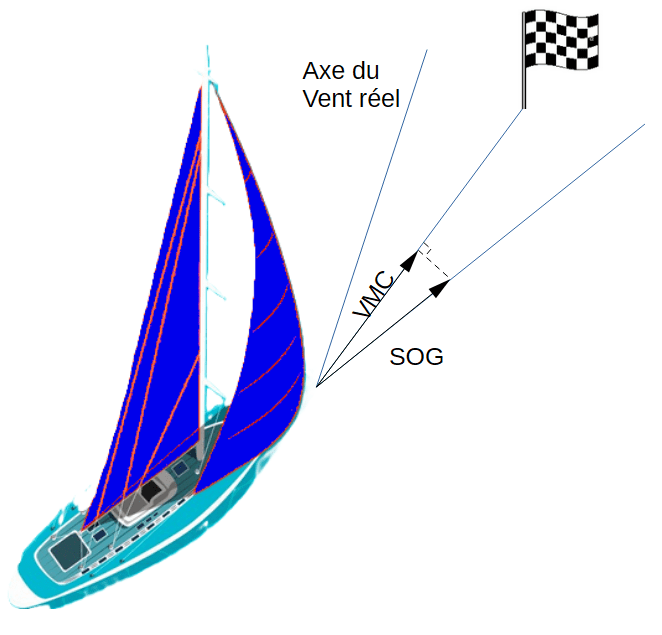
L’objectif étant d’avancer au plus vite vers la destination, le VMC (Velocity Made on Course) est la métrique que l’algorithme des isochrones cherche à maximiser à chaque pas de calcul.
Le VMC est la composante de la vitesse du voilier dans la direction souhaitée. Si le bateau avance à 7 nœuds à 45° du point visé, son VMC vaut 7 × cos(45°) ≈ 4,95 nœuds.
L’algorithme des isochrones : fonctionnement détaillé
L’algorithme procède par expansion itérative. Il simule la position du voilier après chaque intervalle de temps, en considérant toutes les directions de cap possibles et en ne retenant que les points qui constituent l’enveloppe extérieure — la frontière isochrone.
Nous simplifions ici l’explication en faisant abstraction de la gestion des obstacles (côtes, zones interdites), de la prise en compte des courants ou du traitement des données avancées telles que l’influence de l’état de la mer par exemple.
Les étapes de calcul
- Initialisation Le point de départ est connu. La grille météorologique est chargée pour la durée estimée de la traversée : au minimum un fichier GRIB avec les prévisions de vent à intervalle régulier sur la zone de navigation.
- Propagation de l’isochrone Depuis chaque point de l’isochrone courante, le logiciel simule le déplacement du voilier pendant l’intervalle Δt dans toutes les directions. Pour chaque direction, il interroge la polaire avec le vent local (interpolé dans la grille GRIB) pour obtenir la vitesse du bateau, puis calcule la nouvelle position.
- Construction de l’enveloppe convexe Parmi tous les points candidats obtenus, seuls les points qui forment l’enveloppe extérieure sont conservés.
- Détection de l’arrivée À chaque itération, le logiciel vérifie si l’isochrone intersecte une zone définie autour de la destination. Si oui, le moment d’arrivée est estimé par interpolation.
- Reconstruction de la route optimale Par backtracking (remontée en arrière dans l’arbre de calcul), le logiciel retrace la séquence de caps qui, à chaque intervalle de temps, a conduit au point de contact de l’isochrone avec la destination. Cette séquence est la route optimale calculée.
Ainsi, la construction est la suivante :
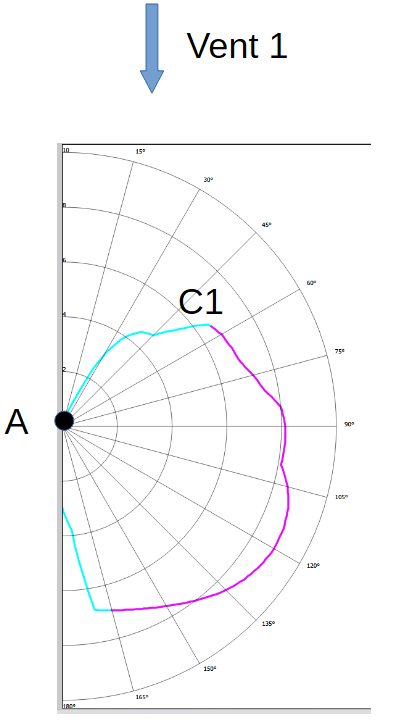
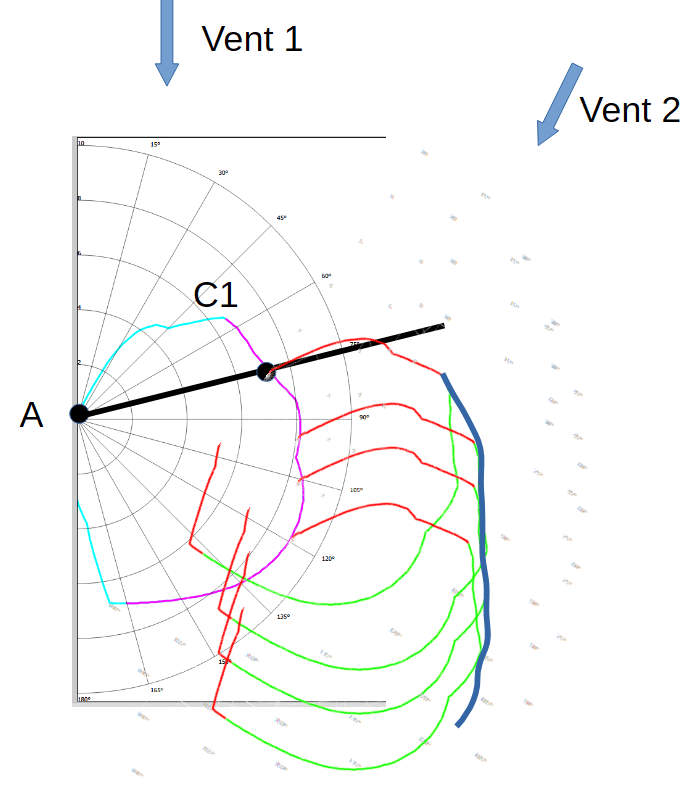
Avec le « vent 1« , selon notre polaire, au bout d’un heure, le bateau peut être quelque part sur la courbe C1 :
Par exemple, en prenant un cap défini sur le graphique ci-dessous, au bout d’un heure, le bateau est au point A1.
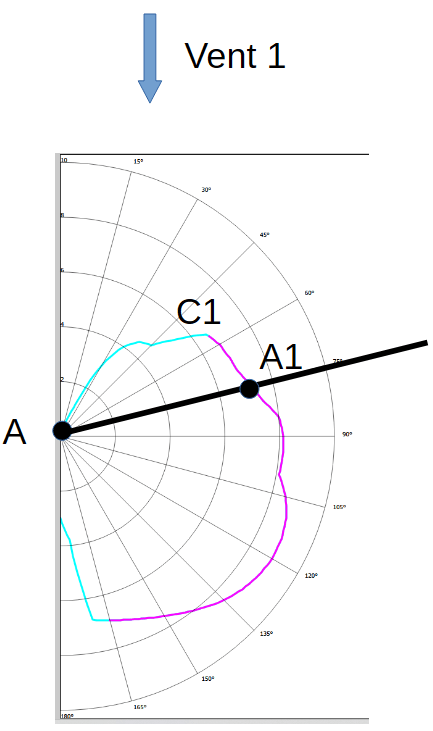
Là, s’il rencontre le « vent 2« , la polaire s’incline en fonction du vent, et au bout d’une heure supplémentaire, le bateau peut se trouver quelque part sur la courbe C2

Maintenant, ne fixons pas un cap à partir de la courbe C1, mais imaginons que l’on construise le graphique pour tous les points de C1. On obtient alors un ensemble de courbes. Et, en dessinant l’enveloppe extérieure (en bleu) à cet ensemble, on obtient les points où peut se trouver le bateau au bout de deux heures en ayant subit la bascule de vent de « Vent 1 » à « Vent 2 » qui est survenue au bout d’une heure. Cette nouvelle courbe est l’isochrone « 2 heures ».
Par construction itérative on obtient ainsi un ensemble d’isochrones.
Une fois que l’isochrone finale intersecte la destination, il reste à reconstituer la route qui y a mené. Pour cela, l’algorithme procède à rebours : il identifie, sur la dernière isochrone, le point d’arrivée, puis remonte à l’isochrone précédente pour retrouver le point depuis lequel ce cap a été emprunté. On répète cette remontée, de proche en proche, jusqu’au point de départ. À chaque étape, on retient le cap qui correspondait au VMC maximal dans les conditions de vent de cet intervalle. C’est cette séquence de caps — reconstituée à l’envers, puis relue dans le sens chronologique — qui forme la route optimale affichée par le logiciel.
Comme on l’imagine, il est plus facile de faire ces opérations à l’aide d’un logiciel plutôt qu’à la main …
Que la méthode, aussi élégance soit-elle, ne vous empêche pas d’appliquer une règle fondamentale : Il faut ajouter son sens marin à la préconisation donnée par le logiciel !

